PLECSのデモモデルに含まれている、この事例では、FEA(有限要素解析)から得られたパラメータ値を適用した、 インバータ駆動非線形永久磁石同期電動機(8極)をモデリングしています。 FEAデータは「MotorSolve(Infolytica)」によって、「プリウス(トヨタ)」用モーターモデルとして生成された値です。
電気回路
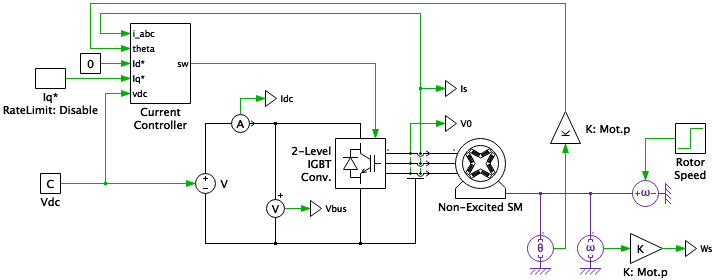
「非励磁同期電動機(テーブル参照)」は、テーブル値を参照して電動機のパラメータを定義可能です。 パラメータで使用するテーブル値は、FEAシミュレータ(例:MotorSolve Infolytica社)から取得可能です。 テーブル値を参照することによって、電動機の飽和/クロスサチュレーションの影響を検証可能になります。
電動機は電流制御器の特性を検証するため定速で駆動しています。 この動作条件はPLECS電動機ブロックモデルの端子に、 回転速度(定常)ブロックを接続することによってモデリング可能ですが、 電動機を回転速度で駆動する場合は、電動機の慣性モーメントパラメータ値を、0 Nms2に設定する必要があります。 インバータは200VDC電源を接続した理想IGBT3相モデルです。
制御ロジック
電流の閉ループ制御のため同期整流レギュレータが適用されています。 電動機から出力される機械的回転速度/回転角、固定子電流はフィードバック信号として検出され、 機械的回転速度/回転角は、制御指令値である電気的速度/角度を指定するため、極対数によってスケーリングされます。

電流制御器は、dq軸成分電流の指令値を算出します。 この制御器は、State-limiting/Anti-windup機構を実装しており、 電動機の回転速度に基づいてデカップリングされ、PI制御器によってdq軸の電流を制御します。 制御ゲインとシステムデカップリングは、次の電動機パラメータに基づいて指定されます:電動機回転速度、電動機インダクタンス値(Ld, Lq)、固定子抵抗。 飽和状態で駆動する電動機のパラメータ値:Ld、Lqは常に変動しますが、 この例題では飽和領域の電動機インダクタンス値が制御設計に適用されています。
3相固定子電流は閉ループ制御のためにフィードバックされます。 フィードバックされた各相の電流値は、制御器内でdq値に変換され、指令値との比較信号として使用します。 インバータ制御には空間ベクトルPWM(SVPWM)が適用され、指定の出力電圧を生成します。
このシミュレーションでは、すべてのトルクは、 q軸磁化電流によって生成され、リラクタンストルクは、0Nmとなります。 電動機が飽和領域で駆動すると、インダクタンス値が変化しますが、 デカップリングパラメータとPIゲインに参照テーブルを適用することによって、 電動機性能の最適化が可能になります。 この事例には代替案として、q軸に発生するエラーを低減するため、 電流指令値の変化を制限する手法が実装されています。 この手法によって、デカップリングパラメータの不一致と、 電動機のインダクタンス変化による影響が低減し、 q軸電流指令値の変化によるd軸電流偏差が減少します。
Try it
モデルは、PLECS Blockset/Standaloneの「PLECSデモモデル」ライブラリに格納されています。