PLECSのデモモデルに含まれている、この事例では、測定誤差と共振状態(力学的)が、電気自動車(EV)システムの性能に及ぼす影響を確認します。システムに発生する問題を低減する制御解決策を実行して、この対策が実施される前後の、システム全体の性能を比較します。
車両モデル
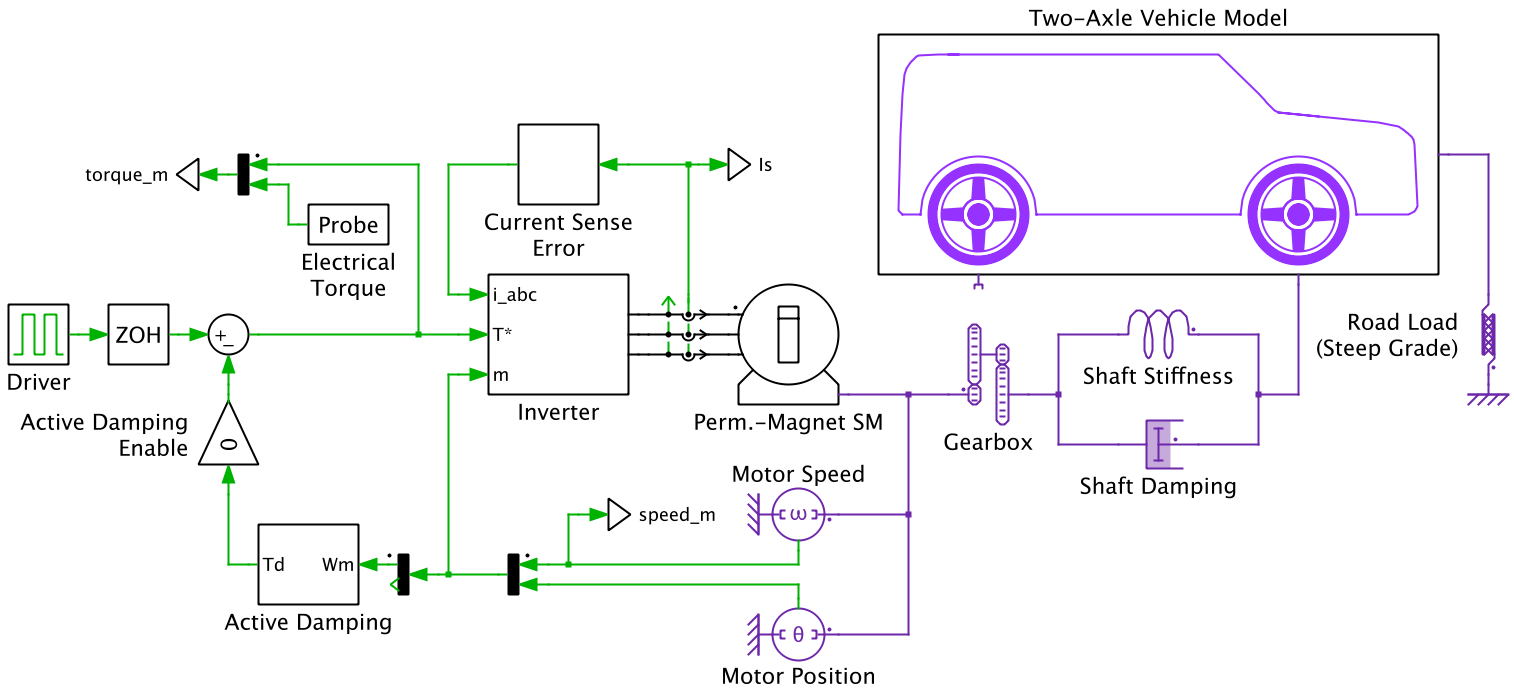
前輪駆動の電動車両(EV)は、「すべり(slip-based)」を考慮した車輪モデルに基づいて実装されています。電動車両(EV)は、シングル・スピード・ギアボックスに連結した、3相永久磁石同期電動機(PMSM)によって駆動します。電動車両(EV)の前輪ギアボックスとディファレンシャルギアを接続するドライブシャフト(ハーフシャフト)の減衰/剛性特性も、システムモデルに実装されています。
パワーエレクトロニクス・システム
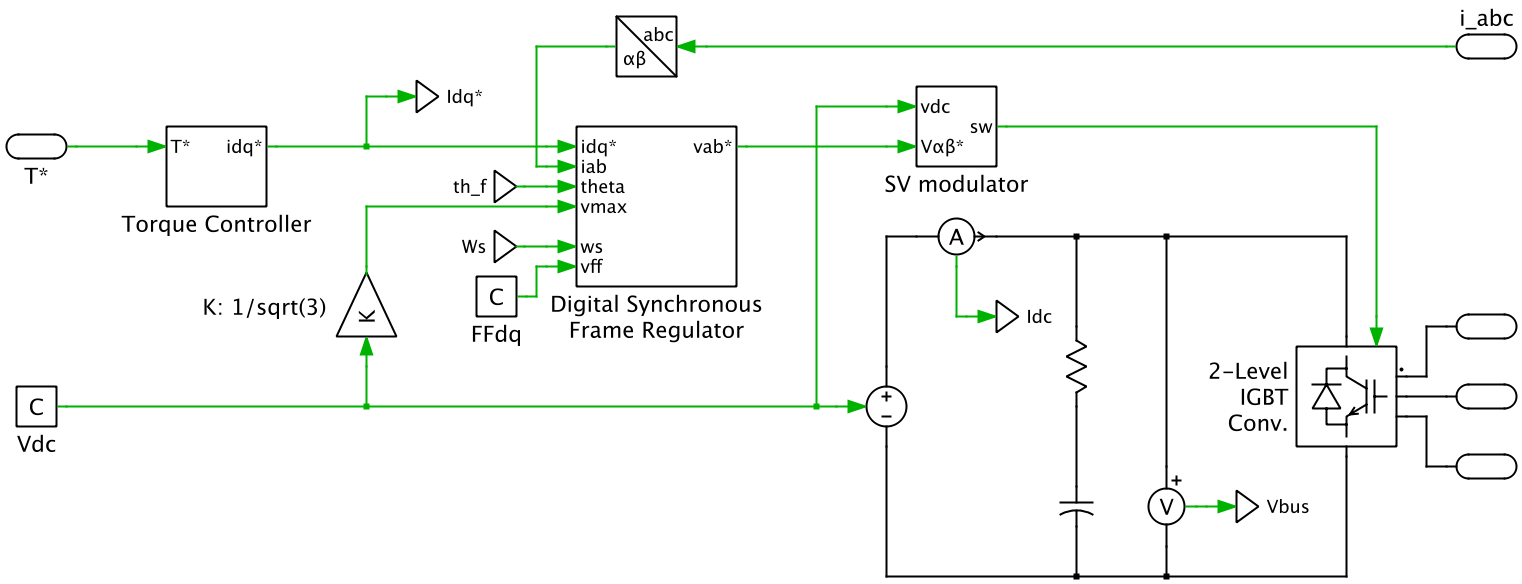
EV車両に電力を供給する電池パックをモデリングするため、理想直流電圧が使用されています。電池はPMSMを駆動する2レベル-電圧形インバータ(VSI)の直流側に接続されています。
「Torque Controller」ブロックは、回転座標(dq)上で、必要トルクを電流指令値へ変換するために実装されています。主回路から検出された静止座標(αβ)の電流ベクトル、回転子位置、直流電圧は、「Digital Synchronous Frame Regulator」ブロックへフィードバックされます。この制御器ブロックは、静止座標(αβ)上で変換された電圧指令値を生成します。この電圧指令値は、2レベル-IGBTインバータ用のスイッチング信号を生成する際に、空間ベクトルPWMブロックが参照します。
システムの複雑性
急激なモータのトルク変動によって、モータの慣性に振動が発生します。この現象は、シャフト(車軸)、モータの回転子慣性、変速比等の弾性係数に対する関数である、固有周期の励振が原因で発生します。
通常、電動機をモデリングする際は、モデルから検出される値は理想化され正確であると仮定しますが、実機で使用する全てのセンサーには、多少のオフセット、ゲイン誤差といった検出誤差が存在します。電流検出のゲイン誤差によって、相電流の基本周波数に対し、2倍のトルク振動が発生することが確認できます。このようなトルクリップルが、上述した力学システムの固有周期を励振するため、車両の運転性能劣化を引き起こします。
シミュレーション
ワインドアップ現象と測定誤差の影響
ワインドアップ現象は、モータ起動時の急激なトルク変動によって発生し、定常状態の電流を計測するセンサーエラーによって誘発され、振動が継続します。例えば、測定した2相の電流に関するゲイン誤差はモデリング可能ですが、各相電流は、それぞれ5%、過大/過小評価されることになるます。これにより、生成するモータトルクに低周波振動が発生し、これがモータ速度の低周波振動になります。
アクティブダンピング(動的減衰)
ドライブトレイン(駆動系)の振動を最小限に低減する手段として、PMSM(モータ)のトルク指令に対し、アクティブ制御を適用します。この手法では、回転子速度を検出して、外側に配置された速度制御ループにフィードバックします。この速度制御ループには、検出された回転子速度から補正トルクを算出する、Anti-windup制御を含めた、デジタルPI制御器が実装されています。この制御器で算出される補正トルクは、運転者のトルク指令に伴い、トルク制御器が参照するトルク指令値を修正するために使用されます。速度制御ループが、トルク制御器が参照するトルク指令値を調整することによって、減衰なしで大幅にワインドアップ現象を低減することが可能になります。
さらに、電流センサの測定誤差により発生するモータ速度の低周波振動も、この速度制御器によって動的に制御されます。モータ速度のフィードバックによって、定常状態のトルク指定値が低周波帯域で調節されます。これにより、モータの低周波速度振動が減少します。
高速域と低速域における効果の比較
モータトルクがシステムを固有周期(f0)で励振する場合、最大定常状態のパワートレイン振幅(電流センサーエラーによる)が発生します。速度(v0)から外れると、定常状態速度の振動が低減します。シンプルなアクティブダンピングアルゴリズムは、車両が「v0」を含む任意の速度で移動しても、振動を低減するよう制御します。