空間ベクトル制御は、従来のPWM方式に比べスイッチング損失の削減が可能、電源の取扱いが簡便、 といった理由によりモータ等の電動機、および3相整流器の制御に適用されます。 PLECSのデモモデルに含まれている、この事例では、3相昇圧整流回路の空間ベクトル制御をモデリングしています。
制御ロジック
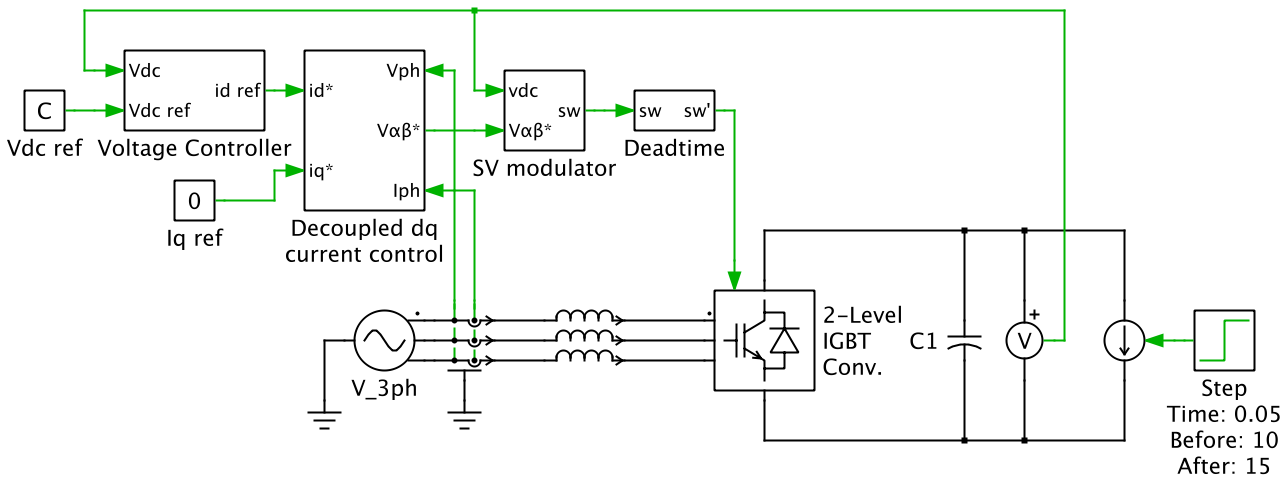
この3相昇圧整流回路の、 入力電源vnから正弦波電流を検出し、 出力電圧VDCを制御することが目標になります。 電流は、相電流Inを検出する内側の電流制御ループで制御され、 インダクタの中性点電圧vn1は、相電流の参照値を追従するよう制御されます。 電流の参照値は、直流電圧と力率を制御する外側の制御ループから算出されます。
空間ベクトル制御では、インダクタ中性点電圧は、 αβまたはdq座標軸のベクトル量として制御されます。 この事例では、dq座標軸上で制御が実行されます。 dq座標で制御を実行する利点としては、 交流の物理量が、dq座標上では、直流の物理量へ変換されることが挙げられます。 これにより、交流入力電流を整流するPI制御器に、トラッキングエラーが発生しなくなります。
交流電圧ベクトルの参照値は、組み合わせ可能なスイッチングベクトルの時間平均化によって生成されます。 2つの一般的な変調ロジックが空間ベクトル変調器に実装されています: スイッチング損失を低減する最適化変調ロジックと、高調波(THD)を低減する対称変調ロジックです。 スイッチング状態が変化する際に整流回路のレッグに発生する、 スイッチングの遅れをシミュレーションするため、デッドタイムのブロックモデルも配置されています。
実装手法
PLECSコンポーネントライブラリに格納されている空間ベクトル変調器ブロックは、C言語入力ブロックでモデリングされています。 ブロックに記述されているCコードは、動作領域を検出し、スイッチングベクトル用のタイミングを算出します。 C言語入力ブロックのサンプリング時間は、離散-固定、または、離散-可変の複合タイムステップが設定可能ですので、 固定スイッチング周期がメジャータイムステップとなり、 内部で算出されるスイッチングベクトルは、異なる間隔で同期してブロックが実行されます。
ダウンロード
PDFフォーマットの説明文書(英文)は、 ここ からダウンロードして下さい。
この事例のPLECS Blockset/PLECS Standalone用ファイルは、デモモデルとして格納されています。